Sabe aquelas vezes em que a nossa programação está certa, as garras são boas e desempenham bem, mas, por seguidas vezes o nosso robô não consegue executar os desafios da mesa e por um mínimo detalhe ele faz tudo certinho? O que será isso, mágica? Nervosismo? Movimentação involuntária da terra? NÃO!
O problema de alinhamento é muito comum e também é possível ser encontrado por várias equipes no mundo todo. Por várias vezes tentamos achar a fórmula mágica em que o robô tem que ficar alinhado com as linhas da mesa, as palavras da base, utilizar dedos de diferença entre a parede e o robô ou quaisquer outras maneiras que possam nos ajudar nesse alinhamento, porém uma forma muito mais simples e efetiva pode ser criada.
O “Gabarito” ou “Alignment Jig” pode ser criado de forma virtual ou física para atender a demanda de sair da base sempre pelo mesmo lugar garantindo assim uma saída “perfeita” dependendo apenas da programação e de sua estratégia para que ele desempenhe uma boa atividade na mesa de desafios.
Vamos conhecer um pouco sobre eles?
O Gabarito Virtual é criado na programação utilizando dois sensores de cor para reconhecerem a linha preta de saída da base. Se o robô reconhecer que existe um atraso no reconhecimento da linha por um dos sensores, o Bloco inteligente (NXT ou EV3) fará uma compensação adicionando mais potência no motor do lado contrário ao atraso para que ele (o robô) seja alinhado o mais rápido possível.
-

Robô alinhando à linha preta

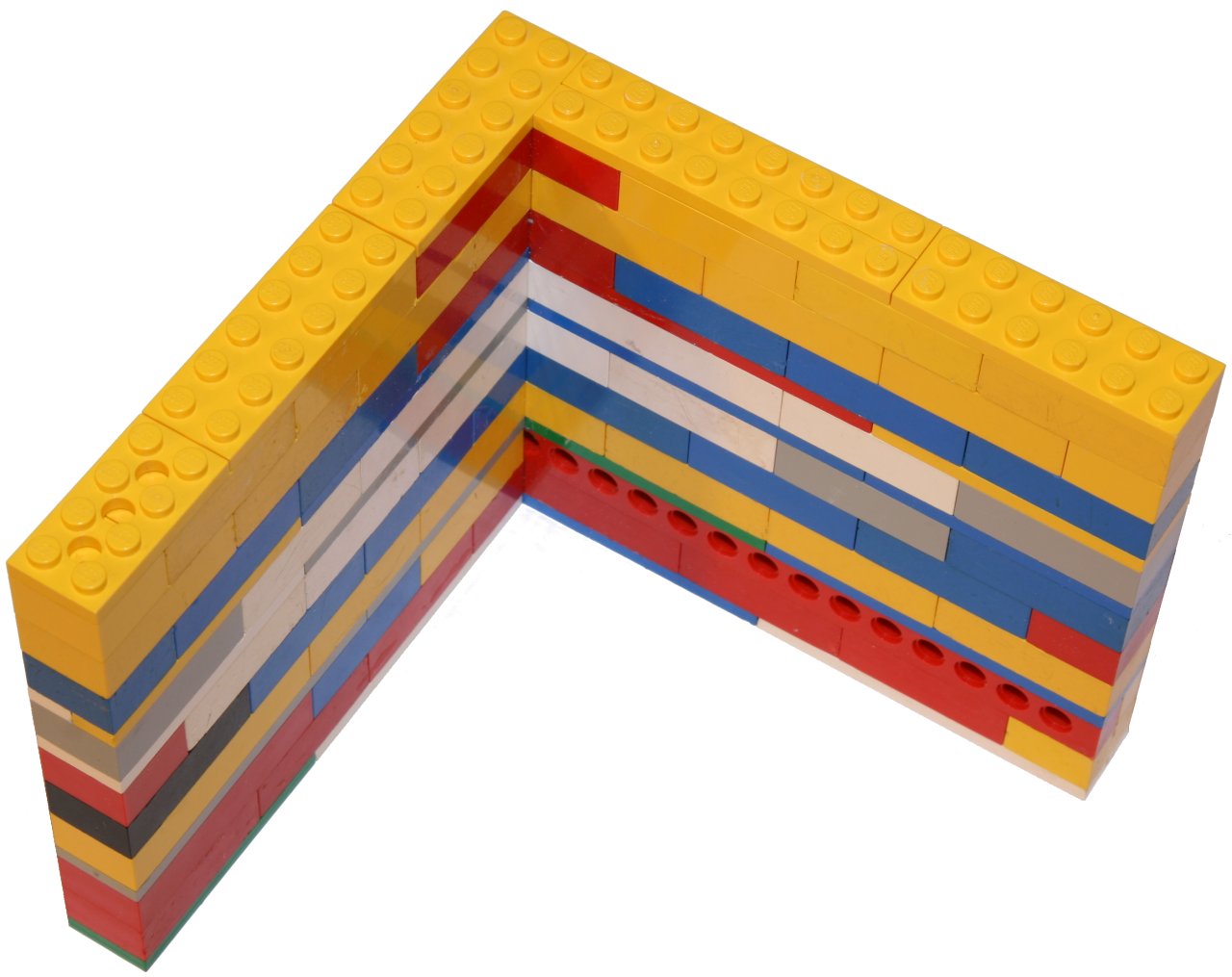
O Gabarito Físico pode ser criado de várias formas possíveis, ele pode ser único para todas as saídas, modular (adaptando-se para cada saída do robô) ou a equipe pode decidir em ter vários gabaritos, um para cada saída. Vamos conhecer algumas que já foram utilizadas na FLL em desafios anteriores ou que podem ser encontrados pela internet?




Como foi mostrado, vários modelos podem ser criados para garantir que o seu robô sempre consiga sair da base alinhado com o seu objetivo. Não existe uma fórmula mágica de qual seria o melhor para sua equipe, mas é interessante quando possível, alinhar as duas alternativas. Dessa forma poderemos corrigir os problemas de cada uma das alternativas. Qual o melhor tipo de gabarito se aplicaria à sua equipe? Conhece outras alternativas? Comente conosco!
Enjoy! 😛
Olá,
Gostei muito do post e recomendo a utilização de gabaritos, porém acho que mesmo utilizando gabaritos diversos erros são acumulados devido a rotação dos motores. Recomendo a utilização de algum alinhamento em algum objeto para só assim ter um ponto de referência e um erro zero, ou utilizar algum seguidor de linha do tipo P.I.D ou só Proporcional. Abaixo há um link de um vídeo criado pela minha equipe ensinando o seguidor de linha proporcional. (Download da programação está na descrição do vídeo ;] ) https://youtu.be/I3xBCp-71Zk