
Olá pessoal, hoje daremos continuidade à explicação sobre rodas que foi iniciada na semana passada. Foi apresentado que para iniciarmos o processo de criação do nosso robô é preciso dedicar um tempo na análise do terreno, ao objetivo, as dimensões e massa. Todas essas verificações são extremamente importantes para que ele possa movimentar com eficácia na mesa.
Quando era pequeno andava de bicicleta (com rodinhas) e sempre achei aquilo muito bacana, corria, brincava, pulava pequenos gravetos e fazia de tudo um pouco parecendo um atleta profissional, mas ao tirar a rodinha descobri que toda aquela movimentação era muito difícil sem um apoio. Por quê isso? Por que não consigo mais fazer como antes? Até cheguei a pedir meu pai para instalar de novo, mas ele me disse que deveria aprender a andar daquela forma a partir de então. Comecei a indagar porque a bicicleta caia mesmo que parada e logicamente percebi que a falta da terceira e quarta rodinhas fizeram essa diferença. A bicicleta em si possui um centro de massa pequeno e por ter rodas longitudinais (uma atrás da outra) não possui uma grande estabilidade quando parada. Mas porque será que em movimento ela consegue se manter em pé? Isso acontece porque ao andar em linha reta, o guidão se torna fixo por alguns instantes mantendo assim o centro de equilíbrio e conjuntamente ao movimento giroscópico das rodas (movimento de giro da roda pelo seu centro de apoio) acabam criando a estabilidade que precisamos.
Hoje precisamos prestar atenção em duas palavras muito importantes no nosso robô, elas são Estabilidade e Centro de Equilíbrio.


Portanto, se o nosso robô tiver um centro de equilíbrio bem definido ele poderá não sofrer com oscilações ou desvios em sua movimentação, assim como obterá firmeza e solidez em seu desenvolvimento.
Sabemos que no modelo EV3 saiu um novo componente chamado giroscópio que ajuda a medir o centro de movimento e que a partir dele é possível criar robôs interessantes como o Giroboy. Mas hoje não iremos dar foco nele, hoje daremos foco ao centro de equilíbrio e estabilidade das nossas construções. Para que tenhamos um bom desempenho na mesa, o centro de massa do robô deve ser centralizado. Como assim? Bem, se tivermos um robô que utiliza apenas duas rodas, é bem provável que ao executar os desafios da mesa que consistem em encostar, mexer, inserir ou trocar objetos de lugar o nosso robô acabe caindo e isso atrapalharia. Para isso, sabemos que podemos contar com alguns recursos. Vamos conhecê-los?
- Ponto de apoio (Support)

É uma parte do robô que encosta na mesa sem atrapalhar no movimento do robô, comumente ele pode ser encontrado utilizando vigas ou eixos. O ponto positivo sobre sua movimentação sem interferir em seu movimento só é válida quanto é utilizada uma superfície lisa. Durante a FLL já encontrei vários robôs que utilizavam soluções bem diferentes como essa “shoe round 2×2”. Todas são válidas e possuem seu valor, o único ponto negativo é que elas se desgastam e acabam criando um ponto de fricção forte contra a mesa/tapete alterando um pouco no percurso ou movimentação do robô.
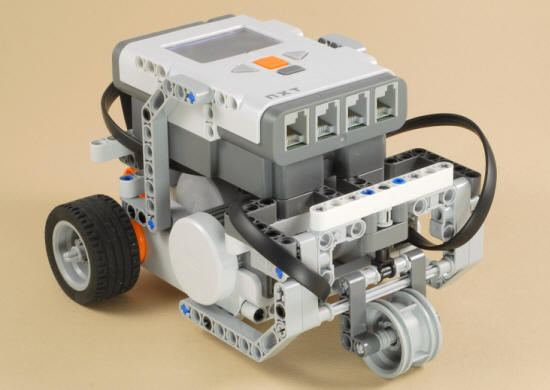
Existe também o uso de rodas sem pneus que podem ser utilizadas como apoio para a movimentação. Elas geralmente ajudam na estabilidade do robô e não possuem muita resistência (atrito) contra o tapete e mesa. Elas devem girar livremente para evitar qualquer problema na movimentação e desempenho.

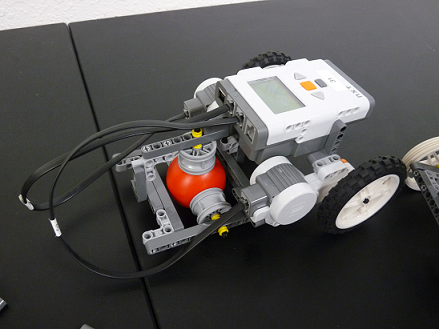
- Third-Wheel (Terceira roda)
É a técnica baseada na movimentação em uma terceira roda criada ou adaptada para a parte traseira do robô adicionando estabilidade e movimentação simples e ágil. O ponto positivo dela é que poderia ser facilmente construída e adicionada ao robô. O ponto negativo dela é que dependendo de como a roda estiver no momento do lançamento (saída) do robô ela poderia interferir levemente na sua movimentação. Por exemplo, se você tentar andar de bicicleta em linha reta mas com o guidão totalmente virado para um lado isso irá lhe atrapalhar no movimento não é mesmo? Para executar esse movimento corretamente você irá colocar a roda em linha reta, facilitando seu movimento. O mesmo problema acontece aqui, se ela não for alinhada com o movimento inicial do robô ela poderá atrapalhar na movimentação programada. Fique de olho! 😉
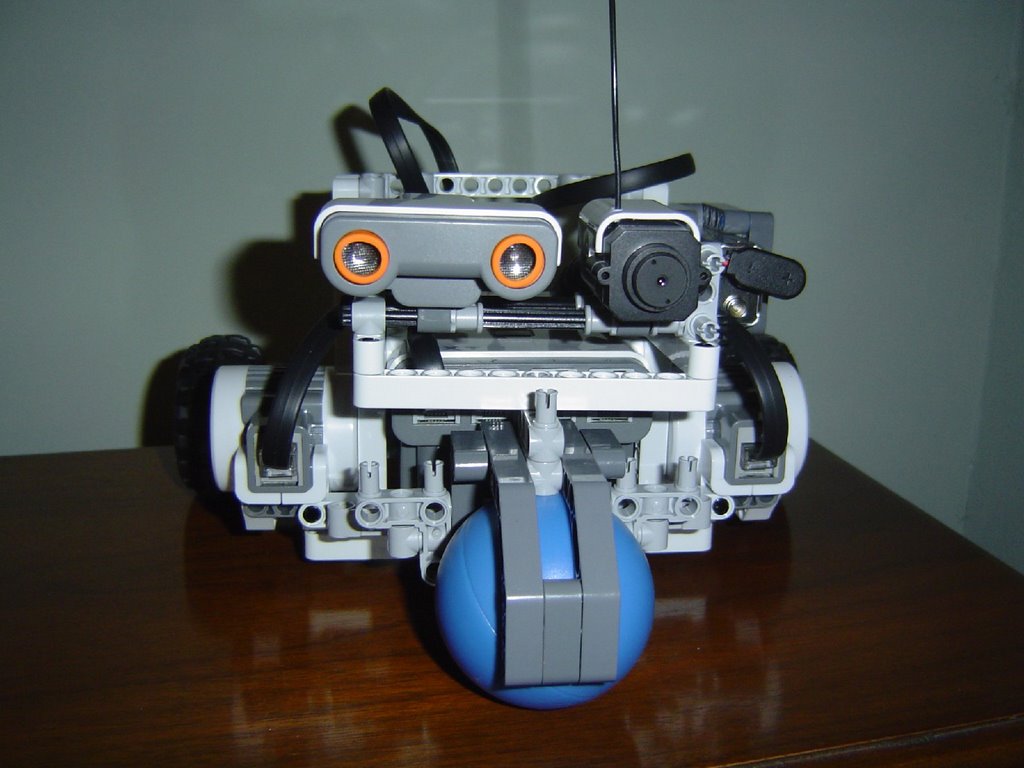
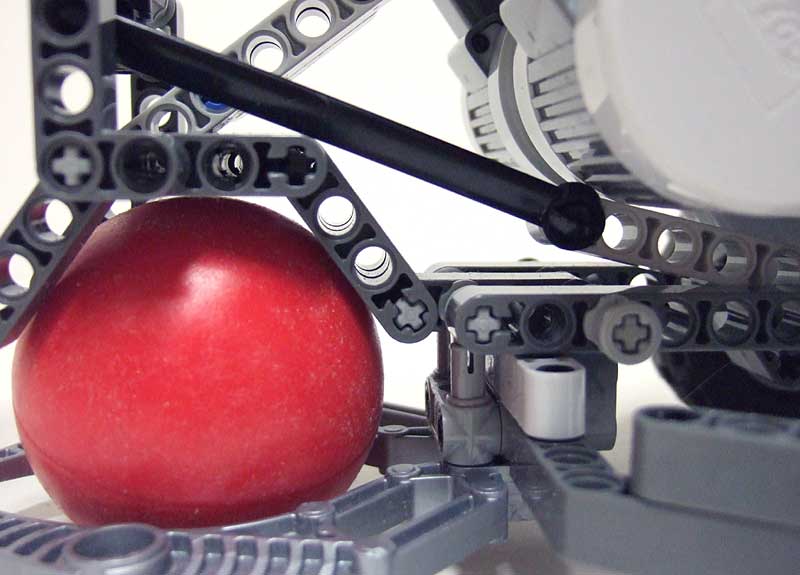
- Ball caster
A Ball caster ou roda de apoio é a junção das duas técnicas anteriores em uma só. Ela é a técnica de construção onde uma bola é usada como ponto de apoio e giratório ao mesmo tempo. Como a bola não possui um lado de giro como a roda ela interfere minimamente no movimento do nosso robô. Essa técnica pode ser construída ou ainda utilizando o novo berço de bola “ballcaster cradle” que vem nos kits EV3. O ponto positivo no seu uso é justamente no que se compele a movimentação na mesa sem impactar no movimento. O ponto negativo é que se ela for construída deve utilizar um espaço um pouco maior do que uma já pronta e que também deve ser aplicada no ponto de apoio correto para não interferir no equilíbrio do robô.

Bem, espero que tenham gostado dessas dicas e que elas possam ser utilizadas por todos nos próximos campeonatos. Se tiverem dúvidas ou dicas de construção de qualquer um deles por favor, nos envie para que possamos discutir sobre eles. Não se esqueçam que o sorteio do prêmio surpresa está valendo e que é muito legal!
Enjoy!
Olá pessoal! Qual o nome da roda/pneu LEGO dessa imagem aqui: http://www.fllstartingpoint.com/wp-content/uploads/2014/09/2014-09-15-16.21.13-624×467.jpg ? Ela tem muita variação?
Olá !
A roda é essa aqui: https://www.bricklink.com/catalogItemPic.asp?P=88517c01
Ela possui uma boa aderência e pelo estilo Slick pode ter uma boa aderência. 🙂
Enjoy!
em qual site posso comprar a roda da imagem http://i2.wp.com/www.fllstartingpoint.com/wp-content/uploads/2014/09/2014-09-15-16.21.13-624×467.jpg?resize=560%2C419
Já verificou no bricklink.com?